GUIリファレンス
| HeartCore Roboドキュメント一覧 GUIリファレンス |
2023-01-04 |
ワークアイテムは作成したロボットプロジェクトのschedules/ディレクトリ配下にXMLファイルとして保存されます。テストスクリプトは相対ファイルパスを介して参照されるため、プロジェクト全体を移動または名前を変更してもワークアイテムは機能します。
ワークアイテムは、スケジューラツールを使用して簡単に作成および管理できます。ワークアイテムを作成するには、次のいずれかを実行します。
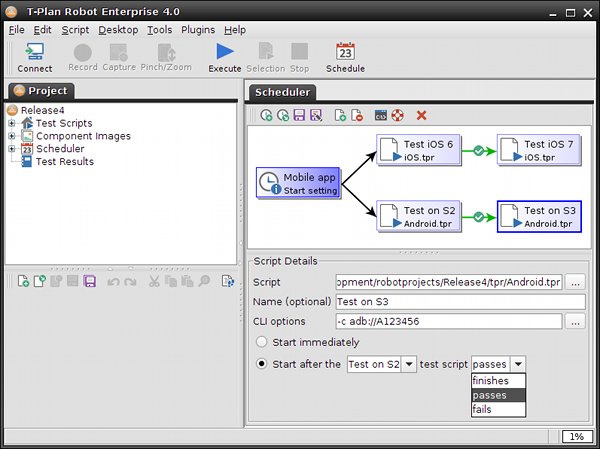
「開始設定」というタイトルの青色の長方形のオブジェクトは、最上位のワークアイテムオブジェクトを表します。下部のタブ付きペインは作業項目の属性へのアクセスを提供します。
[プロパティ]タブにはワークアイテムレポートの作成方法を設定する[ワークアイテム詳細][レポート詳細]セクションがあります。
[ レポートの詳細] セクションでは、ワークアイテムレポートの作成方法を設定できます。
「スケジューリング」タブでは[開始タイプ]プロパティを設定できます。ワークアイテムの開始方法を定義します。(起動オプションについてはワークアイテムの実行に記載のある起動オプションを参照してください):
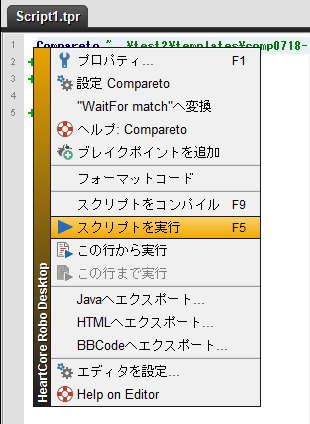
ワークアイテムに最初のスクリプト(「タスク」と呼ばれる)を追加するには、最上位ワークアイテムオブジェクトをクリックし、次のいずれかを実行します。
タスクは、スクリプトファイル名の付いた新しいボックスとしてビューに表示されます。オプションの表示名を付けることができます。
さらにスクリプトを追加するには:
タスクのプロパティは、下のエディタで編集できます。
-c/--connectオプション-p/--passwordのスクリプトでは、スクリプトを実行するテスト環境(サーバーまたはデバイス)を指定できます。例えば、以下のスクリーンショットは、Android over ADB接続を介して接続されたシリアル番号A123456のAndroidデバイス上でスクリプトを起動するようにロボットスクリプトに指示します。-v/--variable指定したスクリプト変数を固定値に設定します。実行固有の値をスクリプトに渡すことができます。このオプションは、複数の変数を設定するために複数回指定することができます。-n/--nodisplayまたは-o/--option、Robot startコマンドのレベルでのみ受け入れられるその他の適用可能なCLIオプション。それらはワークアイテムのすべてのスクリプトに適用されます。ワークアイテム実行の詳細については、「ワークアイテムの実行」の章を参照ください。-n/--nodisplayオプションを指定してCLIモードで実行され、ユーザーライセンスが複数のプロセスを許可する場合、タスクは並行して開始されます。接続の競合に注意、つまり、2つのタスクが同じSUTに接続されていないことを確認してください。たとえば、携帯電話アプリケーションのテストを検討します。iOS(iOS.tpr)とAndroid(Android.tpr)上でテストするための2つのテストスクリプトがあります。計画は、iOS 6デバイスで最初に実行し、iOS 7でも再テストに合格するときです。Androidでのテストは並行して開始されます。Samsung S2デバイスで最初に実行され、合格すればSamsung S3で再テストされます。ワークアイテムは次のようになります。
テストスイートは一般に、個々のテストスクリプトと同じように扱われます。彼らは3つの方法で始めることができます:
 実行 ]ボタンまたは対応するスクリプト - >実行メニュー項目を選択します。実行中のワークアイテムは、
実行 ]ボタンまたは対応するスクリプト - >実行メニュー項目を選択します。実行中のワークアイテムは、GUIはテストスクリプトを並行して実行することができないため、GUIは常に1つずつ順番に実行されます。並列実行の場合は、
-n/--nodisplayオプションとともにCLI またはJavaAPI実行モードを使用します。-r/--runCLIオプションを介してRobotに渡すこともできます。これでロボットが起動し、ワークアイテムを実行して終了します。2つのモードがあります。<Robot_start_command>-r <workitem_XML_file_path>
-n/--nodisplayオプションによってトリガーされます。本番環境への展開にお勧めします。GUIを開くことはできませんので、メモリ要件は非常に低く、高速です。telnetやssh経由でリモートから実行を開始する場合にも適しています。ワークアイテムに並列スクリプトが含まれている場合、それらは並行して開始されます。<Robot_start_command>-n -r <workitem_XML_file_path>
プロセス終了コード
-r/--run引数内のオプションを渡されます。代わりに、既存のワークアイテムインスタンスの実行可能ファイルを作成する新しいcreateAutomatedRunnable(Schedule、String、String []、PrintStream、boolean)メソッドがあります:public static void main(String args[]) {
ApplicationSupport robot = new ApplicationSupport();
AutomatedRunnable t = robot.createAutomatedRunnable("Example" , new String[] {"-r", "<path_to_schedule_XML>" }, System.out, true);
new Thread(t).start();
}
両方とも、public static void main(String args[]) throws ParserConfigurationException, SAXException, IOException {
ApplicationSupport robot = new ApplicationSupport();
com.tplan.robot.scheduler.Schedule schedule = new com.tplan.robot.scheduler.Schedule();
schedule.read(new java.io.File("<path_to_schedule_XML> "));
AutomatedRunnable t = robot.createAutomatedRunnable(schedule, "Example" , new String[] {}, System.out, true);
new Thread(t).start();}
-nか--nodisplayを入力引数のリストに追加することでCLIの実行モードを強制的に許可します:AutomatedRunnable t = robot.createAutomatedRunnable("Example" , new String[] {"-n","-r", "<path_to_schedule_XML>" }, System.out, true);